STEP 1
Make a directory inside your “tessel-code” folder called “servo”, change directory into that folder, and initialize a tessel project:
mkdir servo; cd servo; t2 initSTEP 2
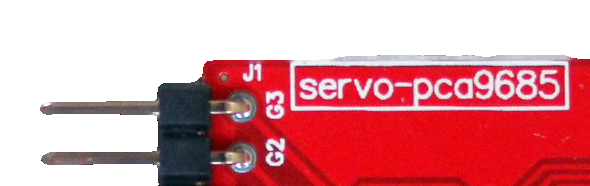
Plug servo into port “1” on the module as shown.
- the brown wire (ground) goes to
- - the red wire (power) goes to
+ - the yellow wire (signal) goes to
S
STEP 3
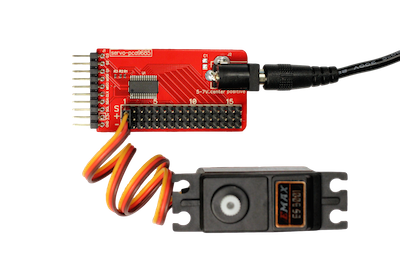
Plug 5V adapter into the barrel jack on the servo module, then plug into wall power.
STEP 4
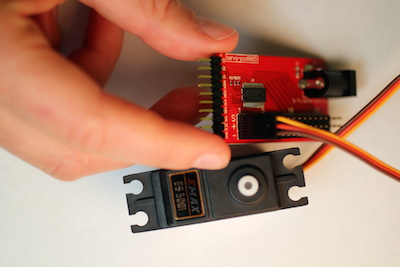
Plug the servo module into Tessel port A with the hexagon/icon side down and the electrical components on the top, then plug Tessel into your computer via USB.
STEP 5
Install by typing npm install servo-pca9685 into the command line.
STEP 6
Rename “index.js” to “servo.js” and replace the file’s contents with the following:
// Any copyright is dedicated to the Public Domain.
// http://creativecommons.org/publicdomain/zero/1.0/
/*********************************************
This servo module demo turns the servo around
1/10 of its full rotation every 500ms, then
resets it after 10 turns, reading out position
to the console at each movement.
*********************************************/
var tessel = require('tessel');
var servolib = require('servo-pca9685');
var servo = servolib.use(tessel.port['A']);
var servo1 = 1; // We have a servo plugged in at position 1
servo.on('ready', function () {
var position = 0; // Target position of the servo between 0 (min) and 1 (max).
// Set the minimum and maximum duty cycle for servo 1.
// If the servo doesn't move to its full extent or stalls out
// and gets hot, try tuning these values (0.05 and 0.12).
// Moving them towards each other = less movement range
// Moving them apart = more range, more likely to stall and burn out
servo.configure(servo1, 0.05, 0.12, function () {
setInterval(function () {
console.log('Position (in range 0-1):', position);
// Set servo #1 to position pos.
servo.move(servo1, position);
// Increment by 10% (~18 deg for a normal servo)
position += 0.1;
if (position > 1) {
position = 0; // Reset servo position
}
}, 500); // Every 500 milliseconds
});
});Save the file.
STEP 7
In your command line, t2 run servo.js Watch your servo move!
Bonus: Make the servo turn all the way to position 1 in one fell swoop, and then back to position 0.
STEP 8
What else can you do with a servo module? Try a community-created project.


{kind=link}